Electrical motor in general is an electro-mechanical device that converts energy from electrical domain to mechanical domain. Based on the type of input we have classified it into single phase and 3 phase motors. Among 3 phase motors, induction motors and synchronous motors are more widely used. When a 3 phase electric conductors are placed in a certain geometrical positions (In certain angle from one another) then an electrical field is generated. Now the rotating magnetic field rotates at a certain speed, that speed is called synchronous speed. Now if an electromagnet is present in this rotating magnetic field, the electromagnet is magnetically locked with this rotating magnetic field and rotates with same speed of rotating field. Synchronous motors is called so because the speed of the rotor of this motor is same as the rotating magnetic field. It is basically a fixed speed motor because it has only one speed, which is synchronous speed and therefore no intermediate speed is there or in other words it’s in synchronism with the supply frequency.
Why is a synchronous motor not self starting?
At starting position of synchronous machine, the rotor could have any alternative position as shown here.
When rotor is initially at position (a):
The like pole of rotor will get repelled and the tendency of rotor will be to rotate in anticlockwise direction. But after some time the N-pole of rotor and S-pole of rotor comes face to face and will try to get attract with each other. Now, the tendency of rotor is to rotate in clockwise direction but the rotor have some mass and cannot attain such a high speed (synchronous speed) to that of stator’s rotating magnetic field. Hence, rotor remains at rest.
When rotor is initially at position (b):
Here, the unlike pole of rotor gets attracted but as explained earlier the rotor cannot attain synchronous speed immediately and remains at rest.

As a result, the average torque exerted on the rotor is zero. Due to the large inertia of the rotor, the rotor fails to rotate along with the stator poles. Hence again the difference of position of magnetic axis gets created and rotor gets subjected to quickly reversing torque. This is because the speed with which rotating magnetic field is rotating is so high that it is unable to rotate the rotor from its initial position, due to the inertia of the rotor. So under any case, whatever may be the starting position of the rotor, synchronous motor is not self starting.
Methods of Starting a Synchronous Motor
The synchronous machine, however, is not self-starting. The synchronous machine has to be rotated to near the synchronous speed of the stator before it can “catch” the stator field and begin rotating on its own. Basically there are three methods that are used to start a synchronous motor:
To reduce the speed of the rotating magnetic field of the stator to a low enough value that the rotor can easily accelerate and lock in with it during one half-cycle of the rotating magnetic field’s rotation. This is done by reducing the frequency of the applied electric power. This method is usually followed in the case of inverter-fed synchronous motor operating under variable speed drive applications.To use an external prime mover to accelerate the rotor of synchronous motor near to its synchronous speed and then supply the rotor as well as stator. Of course care should be taken to ensure that the direction of rotation of the rotor as well as that of the rotating magnetic field of the stator are the same. This method is usually followed in the laboratory- the synchronous machine is started as a generator and is then connected to the supply mains by following the synchronization or paralleling procedure. Then the power supply to the prime mover is disconnected so that the synchronous machine will continue to operate as a motor.To use damper windings or amortisseur windings if these are provided in the machine. The damper windings or amortisseur windings are provided in most of the large synchronous motors in order to nullify the oscillations of the rotor whenever the synchronous machine is subjected to a periodically varying load.
Each of these methods of starting a synchronous motor is described below in detail.
1. Motor Starting by Reducing the supply Frequency:
If the rotating magnetic field of the stator in a synchronous motor rotates at a low enough speed, there will be no problem for the rotor to accelerate and to lock in with the stator’s magnetic field.The speed of the stator magnetic field can then be increased to its rated operating speed by gradually increasing the supply frequency f up to its normal 50- or 60-Hz value. This approach to starting of synchronous motors makes a lot of sense, but there is a big problem: Where from can we get the variable frequency supply? The usual power supply systems generally regulate the frequency to be 50 or 60 Hz as the case may be. However, variable-frequency voltage source can be obtained from a dedicated generator only in the olden days and such a situation was obviously impractical except for very unusual or special drive applications.
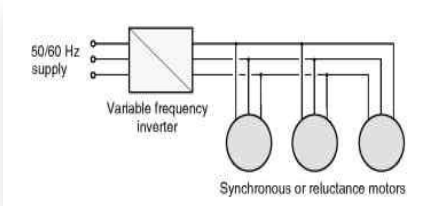
But the present day solid state power converters offer an easy solution to this. We now have the rectifier- inverter and cyclo-converters, which can be used to convert a constant frequency AC supply to a variable frequency AC supply. With the development of such modern solid-state variable-frequency drive packages, it is thus possible to continuously control the frequency of the supply connected to the synchronous motor all the way from a fraction of a hertz up to and even above the normal rated frequency. If such a variable frequency drive unit is included in a motor-control circuit to achieve speed control, then starting the synchronous motor is very easy-simply adjust the frequency to a very low value for starting, and then raise it up to the desired operating frequency for normal running.
When a synchronous motor is operated at a speed lower than the rated speed, its internal generated voltage (usually called the counter EMF) EA = K_! will be smaller than normal. As such the terminal voltage applied to the motor must be reduced proportionally with the frequency in order to keep the stator current within the rated value. Generally, the voltage in any variable-frequency power supply varies roughly linearly with the output frequency.
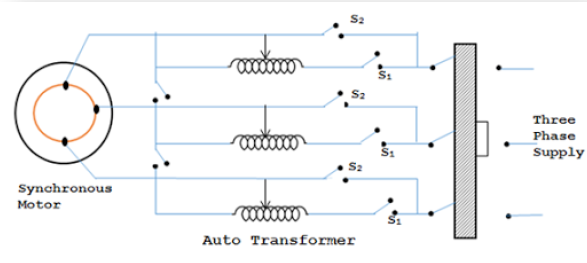
2. Motor Starting with an External Motor:
The second method of starting a synchronous motor is to attach an external starting motor (pony motor) to it and bring the synchronous machine to near about its rated speed (but not exactly equal to it, as the synchronization process may fail to indicate the point of closure of the main switch connecting the synchronous machine to the supply system) with the pony motor. Then the output of the synchronous machine can be synchronized or paralleled with its power supply system as a generator, and the pony motor can be detached from the shaft of the machine or the supply to the pony motor can be disconnected. Once the pony motor is turned OFF, the shaft of the machine slows down, the speed of the rotor magnetic fieldBR falls behind Bnet, momentarily and the synchronous machine continues to operate as a motor. As soon as it begins to operate as a motor the synchronous motor can be loaded in the usual manner just like any motor.

This whole procedure is not as cumbersome as it sounds, since many synchronous motors are parts of motor-generator sets, and the synchronous machine in the motor-generator set may be started with the other machine serving as the starting motor. Moreover, the starting motor is required to overcome only the mechanical inertia of the synchronous machine without any mechanical load (load is attached only after the synchronous machine is paralleled to the power supply system). Since only the motor’s inertia must be overcome, the starting motor can have a much smaller rating than the synchronous motor it is going to start. Generally most of the large synchronous motors have brushless excitation systems mounted on their shafts. It is then possible to use these exciters as the starting motors. For many medium-size to large synchronous motors, an external starting motor or starting by using the exciter may be the only possible solution, because the power systems they are tied to may not be able to handle the starting currents needed to use the damper (amortisseur) winding approach described next.
3. Motor Starting by Using damper (Amortisseur) Winding:
As already mentioned earlier most of the large synchronous motors are provided with damper windings, in order to nullify the oscillations of the rotor whenever the synchronous machine is subjected to a periodically varying load. Damper windings are special bars laid into slots cut in the pole face of a synchronous machine and then shorted out on each end by a large shorting ring, similar to the squirrel cage rotor bars. A pole face with a set of damper windings is shown in Figure.
When the stator of such a synchronous machine is connected to the 3-Phase AC supply, the machine starts as a 3-Phase induction machine due to the presence of the damper bars, just like a squirrel cage induction motor. Just as in the case of a 3-Phase squirrel cage induction motor, the applied voltage must be suitably reduced so as to limit the starting current to the safe rated value. Once the motor picks up to a speed near about its synchronous speed, the DC supply to its field winding is connected and the synchronous motor pulls into step i.e. it continues to operate as a Synchronous motor running at its synchronous speed.


